Multispectral Camera Calibration
MultiSensCalib software was created for calibration of intrinsic and extrinsic parameters of sensor head camera system.
It was made as Ph.D. thesis of Petra Kocmanova in close cooperation with Ludek Zalud.
The calibration comprises the following stages:
- Corner extraction based on automatic corner extraction from Omnidirectional Camera Calibration Toolbox for Matlab.
- Homography from extracted corners.
- Intrinsic and extrinsic parameters are computed from homography according to.
- Nonlinear optimization that minimizes the sum of the squares of the re-projection errors including the determination of distortion first for each camera separately and then for all together.

The calibration is used by our team for Orpheus-X3 mobile robot (see following figure).

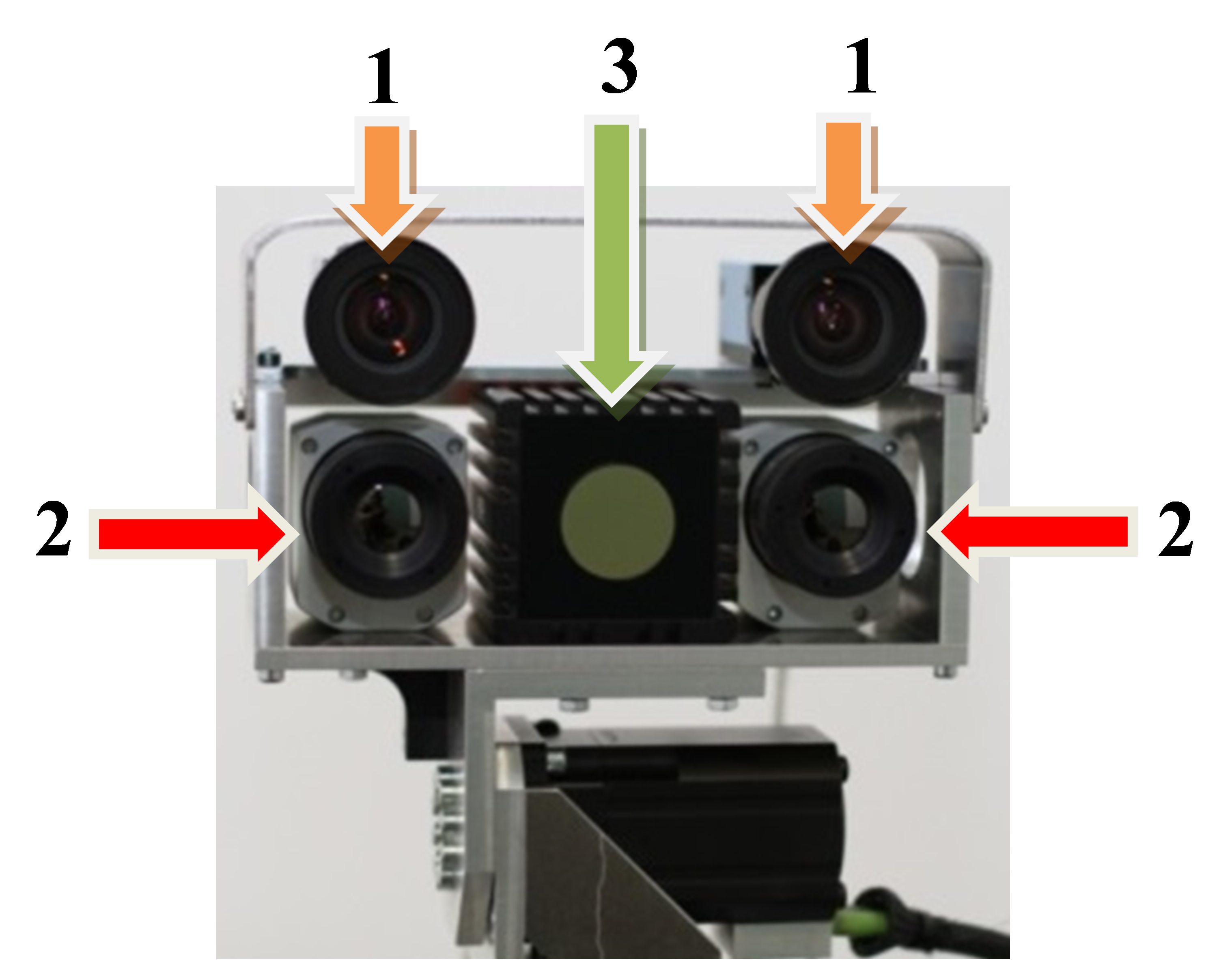
The robot is equiped by multispectral sensory head with three-degrees-of-freedom precise manipulator, containing the following sensors:
- Two identical tricolor CCD cameras (see 1 in the following figure): TheImagingSource DFK23G445 with the resolution of 1280×960 pixels, max. refresh rate of 30Hz, and GiGe Ethernet protocol. This device is equipped with a Computar 5mm 1:1.4 lens. The field of view is 40˚(h) x 51°(v).
- Two identical thermal imagers (see 2): Flir Tau 640 with the resolution 640×512, temperature resolution 0.05K and Ethernet output. The field of view is 56˚(h) x 69˚(v).
- One TOF camera (see 3): A Mesa Imaging SR4000 with the range of 10m, resolution of 176×144 pixels, and an Ethernet output. The field of view is 56˚(h) x 69˚(v).
We decided to make the algorithms and the software publicly available. Following are zip files with appropriate files. The system was tested on Windows 7 and 8.1, 64-bit.
Please do not hesitate to contact us if you have any concerns or suggestions – contact: petra.kocmanova[at]ceitec.vutbr.cz.
Files to download:
executable:
complete source code in Matlab:
example images for testing purposes: